
一、A板介绍
- A板外部晶振为12MHZ,最高主频为168MHZ
二、CAN总线通信原理
1. CAN总线是什么
1.1 CAN总线简介
CAN 是 Controller Area Network 的缩写,最初是汽车行业为了减少车身上的线束,而且还能进行大量数据的高速通信,由德国电气商博世公司在1986 年开发出的面向汽车的通信协议。现在,CAN 的高性能和可靠性已被认同,并被广泛地应用于工业自动化、船舶、医疗设备、工业设备等方面。RM的电机(3508、2006、6020)的控制也采用了CAN协议进行通信。
CAN 总线由 CAN_H 和 CAN_L 一对差分线构成,各个设备一起挂载在总线上。
参考文章:【RoboMaster】从零开始控制RM电机(2)-CAN通信原理及电调通信协议_can通讯 同步触发控制电机-CSDN博客
1.2 CAN通信的特点
1) 多主控制
多个单元同时开始发送时,发送高优先级 ID 消息的单元可获得发送权。
2) 消息的发送
所有的消息由固定格式发送,标识符(Identifier 以下称为 ID)决定优先级。
3) 通信速度
同一CAN总线网络,所有单元必须同一通信速率。
2. CAN通信协议
2.1 帧的种类
CAN通信由五种帧类型
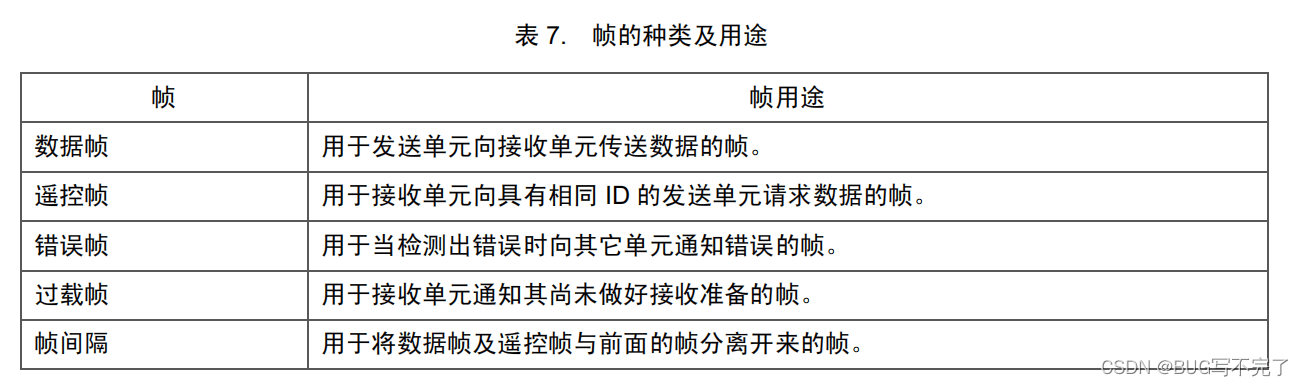
其中数据帧和遥控帧有标准格式和扩展格式两种格式。
标准格式有 11 个位的标识符(Identifier: 以下称 ID),扩展格式有 29 个位的 ID。
控制RM电机使用标准帧。
2.2 数据帧
CAN总线数据帧的帧结构:
主要处理

- 帧起始
表示数据帧开始的段。 - 仲裁场
表示该帧优先级的段。 - 控制场
表示数据的字节数及保留位的段。 - 数据场
数据的内容,可发送 0~8 个字节的数据。 - CRC 场
检查帧的传输错误的段。 - 应答场
表示确认正常接收的段。 - 帧结尾
表示数据帧结束的段。
(1)仲裁场
CAN 的 ID 分为标准 ID 和 拓展 ID 两类,每个设备都有自己独有的ID,CAN通信通过仲裁ID决定优先级。
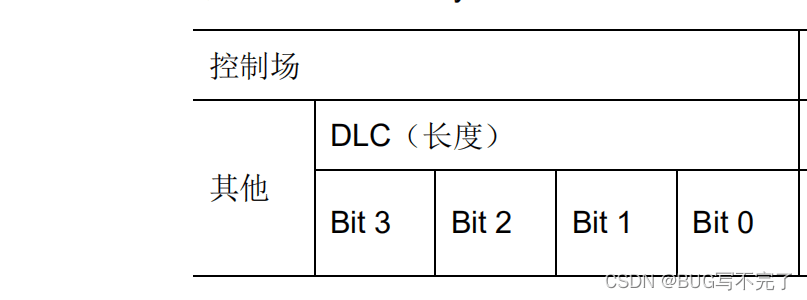
(2)控制场
控制场由 6 个位构成,表示数据段的字节数,C620电调的数据段长度为8
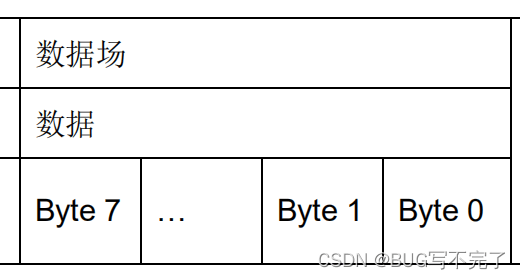
(3)数据场
如果控制场的DLC表示为DRRR,CAN 总线的一个数据帧中所需要传输的有效数据实际上就是这 8Byte。这8字节的排列顺序为从高到低。
三、电调通信
1. M3508&M2006电机
这两种电机代码通用
- M3508使用C620电调
- M2006使用C610电调
1.1 单片机->数据帧->电调
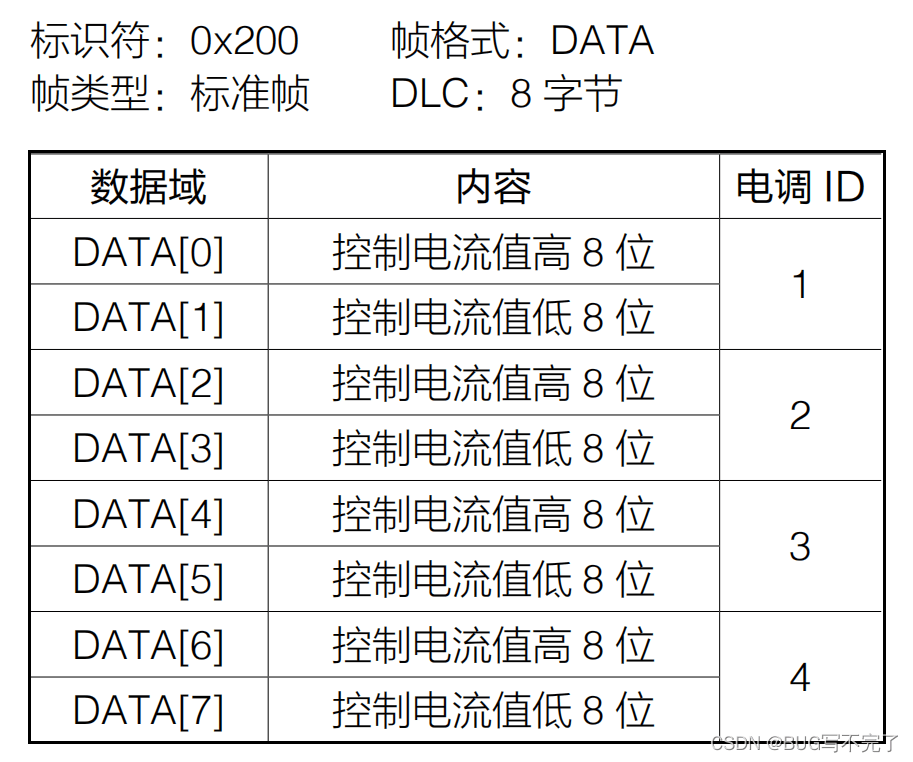
单片机向电调发送控制指令控制电调的电流输出。
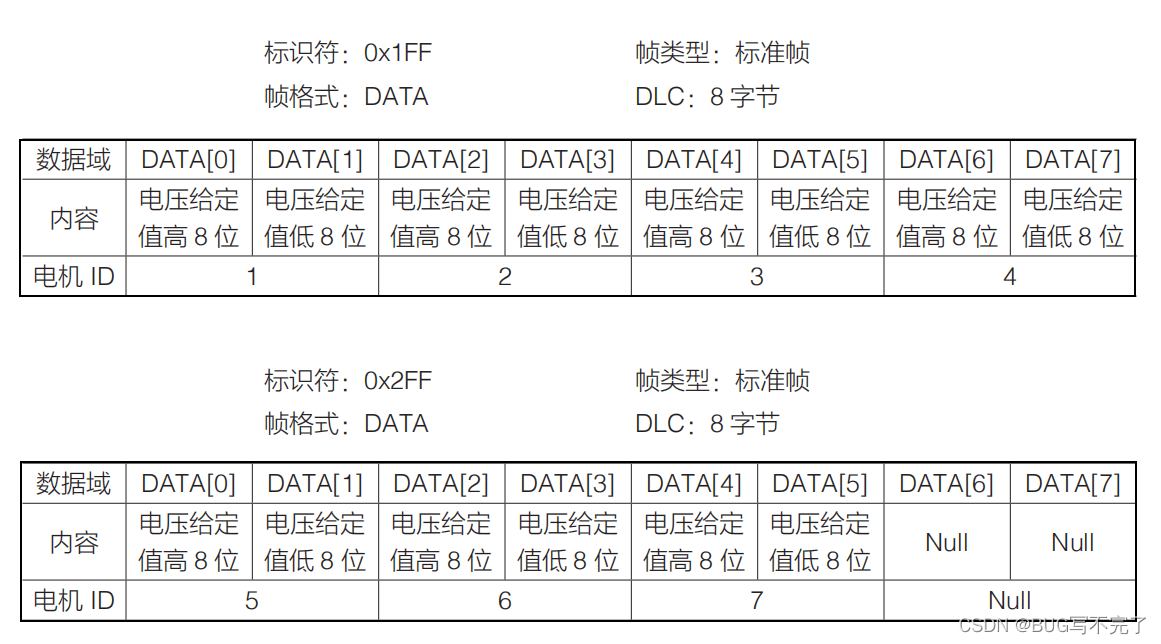
一个数据帧只能给四个电机发送数据,
控制前四个电机时将ID设为 0x200
控制后四个电机时将ID设为 0x1FF
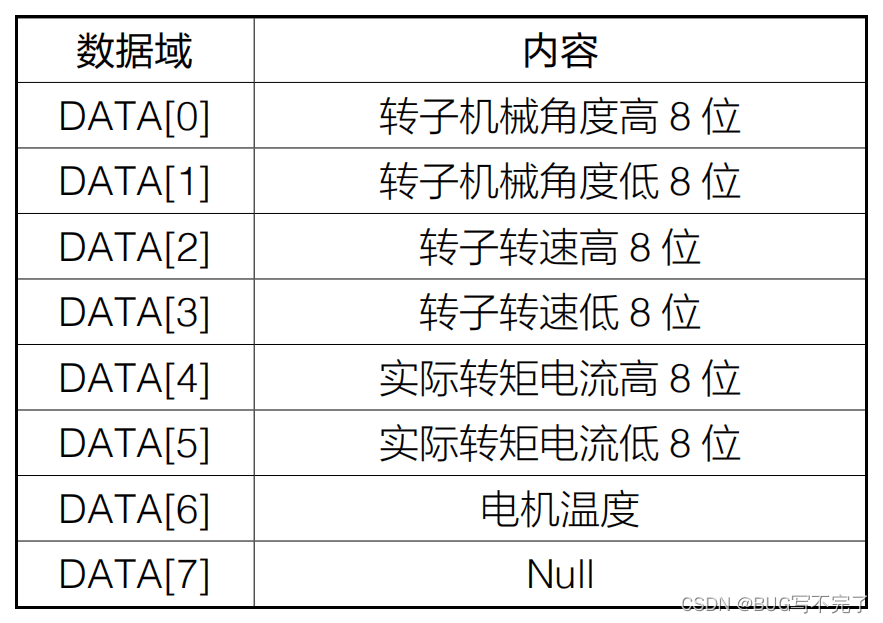
1.2 电调->数据帧->单片机
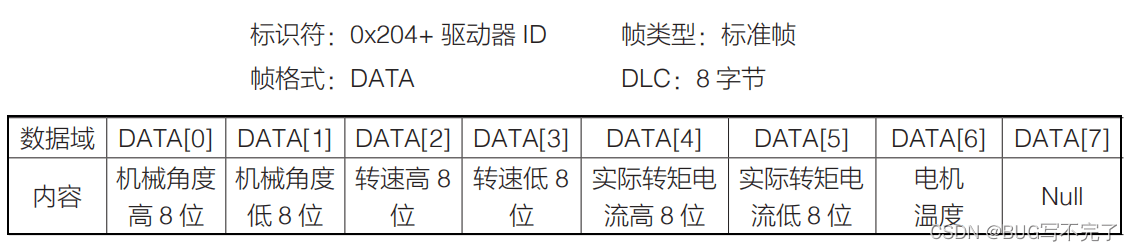
为了实现闭环控制,单片机需要接收电调的反馈报文得到电机的转速、机械转子角度、实时电流数据。
根据接收到的ID判断是哪一个电调的数据,电调反馈报文ID规定为 0x200+电调ID(1-8),如0x201(电调ID为1)。
2. GM6020电机
2.1 发送
2.2 接收
3. CubeMX配置CAN总线协议
- 波特率要设置成1M
4. 程序实现
4.1 CAN数据帧发送
/** * @brief 设置并发送电机控制命令 * @param hcan CAN句柄 * @param STDID 标准ID * @param motor1 电机1控制值 * @param motor2 电机2控制值 * @param motor3 电机3控制值 * @param motor4 电机4控制值 */void Set_motor_cmd(CAN_HandleTypeDef *hcan, uint32_t STDID, int16_t motor1, int16_t motor2, int16_t motor3, int16_t motor4){ uint32_t send_mail_box; // 定义一个变量用于存储发送邮箱编号
// 设置发送消息的标识符 CANx_tx_message.StdId = STDID; CANx_tx_message.IDE = CAN_ID_STD; // 标识符选择位,STD-标准帧 CANx_tx_message.RTR = CAN_RTR_DATA; // 定义帧类型 CANx_tx_message.DLC = 0x08; // 数据帧长度为8位
// 填充要发送的数据 CANx_send_data[0] = motor1 >> 8; CANx_send_data[1] = motor1; CANx_send_data[2] = motor2 >> 8; CANx_send_data[3] = motor2; CANx_send_data[4] = motor3 >> 8; CANx_send_data[5] = motor3; CANx_send_data[6] = motor4 >> 8; CANx_send_data[7] = motor4;
// 发送CAN数据 HAL_CAN_AddTxMessage(hcan, &CANx_tx_message, CANx_send_data, &send_mail_box); // hal库CAN发送函数:该函数用于向发送邮箱添加发送报文,并激活发送请求}4.2 CAN数据帧接收
/** * @brief CAN接收回调函数 * 处理CAN接收到的数据帧 * @param hcan CAN句柄 */void HAL_CAN_RxFifo0MsgPendingCallback(CAN_HandleTypeDef *hcan){ CAN_RxHeaderTypeDef RX_Header; // 定义数据帧的帧头 uint8_t RX_BUFFER[8]; // 接收存放数据帧数据的数组
// 获取CAN接收到的数据帧并存入局部变量 HAL_CAN_GetRxMessage(hcan, CAN_RX_FIFO0, &RX_Header, RX_BUFFER);
static uint8_t i = 0;
// 判断接收的是CAN1还是CAN2 if (hcan